智能循迹小车硬件设计及路径识别算法
本文主要对车模整体设计思路、硬件与软件设计及车模的装配调试过程作简要的说明。
1 整体设计
系统按照功能划分为:电源模块 电源模块
电源模块
电源模块是可以直接贴装在印刷电路板上的电源供给器,其特点是可为专用集成电路(ASIC)、数字信号处理器 (DSP)、微处理器、存储器、现场可编程门阵列 (FPGA) 及其他数字或模拟负载提供供电。 [全文]
、单片机单片机单片机是单片微型计算机(Single-Chip Microcomputer)的简称,是一种将中心处理器微处理器随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)采纳超大规模集成电路技术集成到一块硅片上构成的微型计算机系统。 [全文]
操纵系统模块、运行调试模块、路径识别模块、直流电机驱动模块、舵机转向模块、速度测试模块等。图1是小车系统硬件模块图。本文重点介绍路径识别模块、直流电机驱动模块、舵机转向模块、速度测试模块。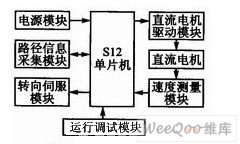
图1 小车系统硬件模块图
1.1 路径识别模块
路面信息检测模块要能够实现检测路径参数。将面阵CMOS用于赛道参数检测的方案,充分利用S12单片机内部硬件资源ATD模块,直接采集CMOS输出的模拟信号,可以获得满足参数检测需要的图像,计算出赛道参数,进而完成路面信息检测。检测路径传感器传感器
凡是利用一定的物性(物理、化学、生物)法则、定理、定律、效应等把物理量或化学量转变成便于利用的电信号的器件。传感器是测试系统中的一种前置部件,它将输入变量转换成可供测试的信号”。按照Gopel等的说法是:“传感器是包括承载体和电路连接的敏感元件”,而“传感器系统则是组合有某种信息处理(模拟或数字)能力的系统”。传感器是传感系统的一个组成部分,它是被测试信号输入的第一道关口。 [全文]
采纳CMOS图像传感器图像传感器图像传感器属于光电产业里的光电元件类,随着数码技术、半导体制造技术以及网络的迅速进展,目前市场和业界都面临着跨越各平台的视讯、影音、通讯大整合时代的到来,勾划着未来人类的日常生活的美景。以其在日常生活中的应用,无疑要属数码相机产品,其进展速度可以用日新月异来形容。短短的几年,数码相机就由几十万像素,进展到400、500万像素甚至更高。不仅在发达的欧美国家,数码相机已经占有很大的市场,就是在进展中的中国,数码相机的市场也在以惊人的速度在增长,因此,其要害零部件――图像传感器产品就成为当前以及未来业界关注的对象,吸引着众多厂商投入。以产品类别区分,图像传感器产品主要分为CCD、CMOS以及CIS传感器三种。 [全文]
。一般CMOS传感器图像分辨率都在300线之上,远大于光电管阵列。通过镜头,可以将车模前方很远的道路图像映射到CMOS器件中,从而得到车模前方很大范围内的道路信息。对图像中的道路参数进行检测,不仅可以识别道路的中心位置,同时还可以获得道路的方向、曲率等信息。利用CMOS器件,通过图像信息处理的方式得到道路信息,可以有效操纵车模运动,提高路径跟踪精度和车模运行速度。
1.2 直流电机驱动模块
为了利用单片机实现对主电机的操纵,使用Motorola公司的H桥芯片MC33886。该芯片的供电电压在5~40 V之间,MOSFET管的导通电阻电阻
电阻,物质对电流的阻碍作用就叫该物质的电阻。电阻小的物质称为电导体,简称导体。电阻大的物质称为电绝缘体,简称绝缘体。 [全文]
为120 mΩ,操纵信号的输入兼容TTL/CMOS电平,PWM的最高频率可达10 kHz,同时具有短路守护功能和故障信号的输出。 MC33886的应用示意图如图2所示。图中,V+是为直流电机供电的电源电源
电源是向电子设备提供功率的装置,也称电源供给器,它提供计算机中所有部件所需要的电能。[全文]
。IN1和IN2两个逻辑电平输入端分别操纵输出端OUT1和OUT2。当IN1输入高电平时,OUT1输出也为高电平――即通过H桥与V+导通;当IN1输入低电平时,OUT1输出也为低电平――即通过H桥与GND导通。IN2和UT2的关系与此相同。FS为故障信号开漏极输出,低电平有效。当D1是高电平或者D2是低电平时,同时禁用OUT1和OUT2的输出,使OUT1和OUT2同时变为高阻态。通过操纵IN1和IN2的电平,即可操纵电机正转、反转、停转。对IN1和IN2的电平信号进行脉宽调制,即可操纵电机的转速。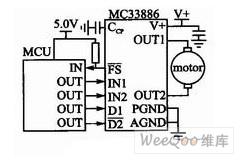
图2 MC33886的应用示意图
主电机驱动电路采纳大赛组委会指定的竞赛用电池电池
电池是一种能量转化与储存的装置,它通过反映将化学能或者物理能转化为电能。电池即一种化学电源,它由两种不同成分的电化学活性电极分别组成正负两极浸泡再能提供媒体传导作用的电解质中,当连接在某一外部载体上时,通过转换其内部的化学能来提供电能。 [全文]
直接为MC33886及主电机供电。MC33886的所有输入、输出信号均采纳TLP521-4光电耦合芯片隔离,以幸免驱动电路对单片机的正常工作造成干扰。为了保证MC33886散热良好,该电路板上依据MC33886数据手册的推举样式设计了散热敷铜并为MC33886安装了散热片。焊接、装配时,将电路板正面的敷铜与MC33886底部的裸露的散热铜焊盘焊接在一起,可大大增强芯片的散热能力。1.3 舵机转向模块
利用汽车转向机构原理,为了保证小车在转弯过程中,既能快速响应,又防止速度过快冲出跑道,把舵机的位置进行了提升,可以增大力矩,使小车快速响应,按照轨迹进行快速转弯。测试出摄像头摄像头
摄像头是一种输入器件,是用来组成电脑或其他机器的视觉系统的重要部件。摄像头如今已成为人们日常沟通,视频会议,安防监控和远程医疗等活动不可或缺的器材之一。 [全文]
能够检测到的黑线位置,并量车距离为b,测试车正中间和黑线的横向距离为a,那么转角的正切就等于b/a,如图3所示。可以使用这个方法,把黑线从视野最左端移动到最右端,分别测试出转角。由于舵机连杆加长,可发现转角于舵机的PWM值基本是线性的,所以舵机操纵采纳P操纵即可。再考虑到转弯必须有一定的及时性,所以并不采纳PID操纵。
图3 舵机转向测试
1.4 速度测试模块
考虑到成本要求,采纳了红外对管和黑白码盘作为测速模块的硬件构成。其中码盘为32格的黑白相间圆盘,如图4所示。

图4 码盘
红外传感器红外传感器
红外传感器是利用红外线来探测物体的测试器件,内部发射非凡红外线光波,相当数据流,也就是数字信号转成红外信号---红外信号转成数字信号(达到操纵,信号传输的效果)。 红外传感器属于周密型传感器,它具有相当好的测试针对性。 [全文]
安装在正对码盘的前方,虽然这样做精度比编码器要低很多,但是成本低廉制作轻易,假如智能车速度较快,可以考虑再减少码盘上黑白色条的数量即可。当圆盘随着齿轮转动时,光电管接收到的反射光强弱交替变化,由此可以得到一系列高低电脉冲。设置MC9S12DG128的ECT模块,同时捕捉光电管输出的电脉冲的上升沿和下降沿。通过累计一定时间内的脉冲数,或者记录相邻脉冲的间隔时间,可以得到和速度等价的参数值。
2 图像采集及处理
2.1 图像采集
常用的摄像头视频输出信号是PAL电视机制式,它的工作原理与电视机的工作原理相似:在一定分辨率下,每秒扫描25帧图像,每帧图像含有625行信息,分为奇、偶场,进行隔行扫描,总共每秒50场信号,每场有312.5行信息,从奇数行开始扫描,即依次扫描第1、3、5、7、9……行,当扫描完奇数场后,再开始扫描偶数场,构成一帧图像。
对图像的采集即是根据摄像头的行信号和场信号对图像模拟量采集。输出信号包括行同步信号,场同步信号,图像时间,以及各种消隐时间。行同步信号代表一行的图像数据扫描开始,场同步信号代表一帧的图像数据扫描开始。要完成图像的正确采集,必须严格遵守时序的要求:当捕捉到一行信号时,开始对该行各点的模拟量进行采集,当下一行信号产生时表明该行采集完毕,需要对下一行的模拟量进行采集。
2.2 图像采集的主要硬件设计
摄像头产品说明上通常会给出有效像素和分辨率,分辨率即为每场信号中真正为视频信号的行的数目。但产品说明上通常不会具体介绍视频信号行的持续时间、它们在每场信号中的位置、行消隐脉冲的持续时间等参数,而这些参数又关系到图像采样的有效实现。因此需要设计软、硬件方法实际测试一下这些参数。
经过测试,所采纳的CMOS摄像头每秒能够输出25帧图像信号,每帧分为奇场和偶场,每场包含312线,那么,每条线的扫描时间大约为64 μs。
通常,摄像头横向(行方向)的像素数远多于对单行视频信号A/D采样的点数。真正决定赛车图像采样模块实际横向分辨能力的不是摄像头横向的像素数,而是A/D采样单行视频信号的点数。所以,把摄像头旋转了90°使用,把以前的线信号组合起来,变成行信号,所以在一行的赛道信息上最多采集到312个点,这样就可以满足路径识别的需要了。
摄像头使用12 V的电源供电,所以设计了升压电路,如图5所示。
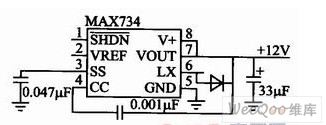
图5 升压电路
在方案中,使用LM1881视频分离芯片来辅助采样视频。LM1881提取摄像头信号的行同步脉冲、消隐脉冲和场同步脉冲,并将它们转换成数字电平直接输给单片机的I/O口,可以使用S12单片机I/O口的中断功能来接收这些信号。图6为LM1881的电路图。
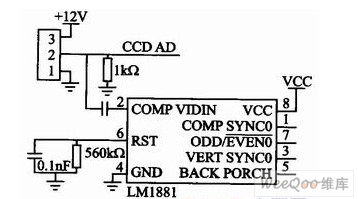
图6 LM1881的电路图
引脚1为行同步信号输出端,它输出的信号波形只是输入的摄像头信号在黑屏电位之下的波形的简洁复制。引脚2为视频信号输入端,摄像头信号即由此输入LM1881。引脚3为场同步信号输出端,当摄像头信号的场同步脉冲到来时,该端将变为低电平,一般维持230μs,然后重新变回高电平。引脚7为场同步信号输出端,当摄像头信号处于奇场时,该端为高电平,当处于偶场时为低电平。奇偶场的交替处与场同步信号的下降沿同步,也就是和场同步脉冲后的上升沿同步。
3 视频信号的采样和滤波
3.1 视频信号的采样
摄像头每场信号包括312行,即每场会扫描产生312行的视频信号。也就是说,摄像头在纵向上有312像素的分辨能力,这对于本智能车定位系统设计所要求的图像传感精度来说远远够用。为方便设计,忽略奇场和偶场在扫描位置上的细微差别,认为奇、偶场的扫描位置相同。当然,在测试中发现,312行信号并不能够全部使用,其两侧信号并不是有效的视频信号,而312个点显然数量巨大且占用太多的计算时间。所以,每隔4行扫描一次,而排除首尾无效的信号点。一共使用了60行作为需要处理的视频信号,显然对于路径检测来说,已经足够了。而在采样过程中发现,假如不对ATD模块进行超频,则很难采集在有效视野中的多行信号。所以,在把单片机总线总线
总线是将信息以一个或多个源部件传送到一个或多个目的部件的一组传输线。通俗的说,就是多个部件间的公共连线,用于在各个部件之间传输信息。人们经常以MHz表示的速度来描述总线频率。 [全文]
频率超频到40 MHz的同时,还需要把ATD模块进行超频,这样可以加快其采样速度,能够在同等的时间内获得更多的行视频信号。视频信号采集后,可以使用单行信号对舵机进行P操纵,也可以使用多行信号进行大弯道和S弯的推断。3.2 视频信号的滤波
拿一行视频信号为例,采集到的60个数据逐个转换为0和1存储到一个一维数组中,这个数组是一个0和1组成的序列,“1”代表白色,“0”代表黑色。通常,由于各种缘由,视频信号里会带有杂波,假如不滤除的话,会对路径的推断带来麻烦。所以,编写了滤波函数对视频信号进行滤波,事实证实,这样的滤波函数在时间上完全满足要求,并且滤波很可靠。滤波函数的主要原理是,滤波函数1主要负责把数组中异常的单个杂波信号滤除,假如有一个序列如下:
1 1 1 1 1 1 1 0 1 1 1 1 1 1 1
则程序会检测到0所在的位置,并且把它的值取反,而对于只有一个杂波1的序列,此方法同样有效。在函数中一共作了60次循环,假如检测到第i个元素与第i-1个和i+1个都不相同的话,则把第i个元素进行取反操作。这样,使用此函数对行视频信号进行扫描,可以有效地滤除单个杂波信号。
滤波函数2主要负责把数组中异常的两个杂波信号滤除,假如有一个序列如下:
1 1 1 1 1 1 0 0 1 1 1 1 1 1 1
则程序会检测到0 0所在的位置,并且把它们的值取反,而对于只有两个杂波11的序列,此方法同样有效。在函数中一共作了58次循环,假如检测到第i个元素与第i-1个和i+2个都不相同而与第i+1个相同的话,则把第i个和i+1个元素进行取反操作。这样,使用此函数对行视
频信号进行扫描,可以有效地滤除两个杂波信号。
4 结论
在实验中得到了测试结果,当检测到路径信息时,数组中0的个数一般不会低于3个。所以,滤除一个和两个杂波数据并不会影响到正常的路径识别,而同时出现3个杂波数据而且又处于相临的位置,这样的可能非常微小,可以忽略不计。事实证实,这个方法既可以滤除赛道上的杂波信号,也可以滤除路径上的杂波信号,效果非常显着。
来源:COCO
该文章来至网络或用户,仅供学习交流之用,版权归原作者所有。
如有侵权,请及时与我们联系!

基于HC9SDGl28单片机的智能车的设计
摘要:为了综合利用操纵、模式识别、传感器技术、汽车电子、电气、计算机、机械等专业领域知识,设计实现了一个基于PID操纵算法,CCD检测系统,并采纳HC9SDGl28单片机作为...
PIC单片机原理
据统计,我国的单片机年容量已达1-3亿片,且每年以大约16%的速度增长,但相对 于世界市场我国的占有率还不到1%。这说明单片机应用在我国才刚刚起步,有着广阔的前景。培养...
基于M68HC08的LIN节点设计与实现
摘要:基于LIN(LocalInterconnectNetwork)汽车总线技术和M68HC08微操纵器的基本特点,设计了基于M68HC08微操纵器的LIN主从节点硬件电路,具体阐述了基于设计的主从节点LIN报...
基于DSP的实时图像目标搜索与跟踪系统设计
摘 要:本文介绍了一种基于双TMS320VC5416处理器的实时图像搜索跟踪处理系统,具体阐述了该系统的硬件设计思想,并结合一种跟踪算法实例叙述了基于DSP的图像搜索与跟踪处理...
一种DSP芯片外围电路典型设计
引 言 DSP(数字信号处理器)芯片是一种能够实时快速地实现各种数字信号处理算法操纵的微处理器,已经在通信与信息系统、信号与处理、自动操纵、雷达、航空航天、医疗等许多...
